智能驾驶领域的竞争正悄然进入一个新阶段,各大车企纷纷加速布局“车位到车位”功能,标志着“城市NOA开城大赛”后的又一场技术较量正式拉开帷幕。
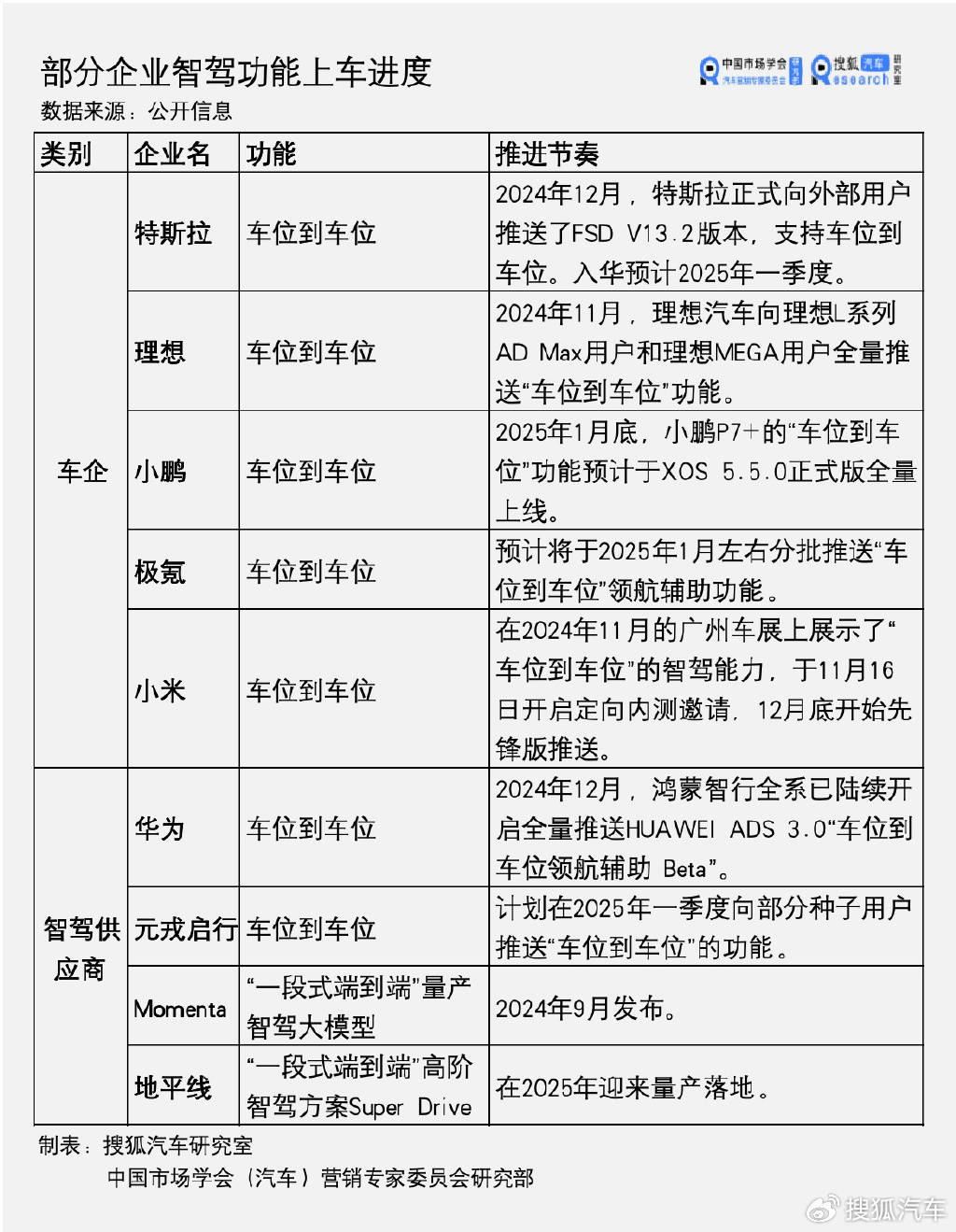
自2024年起,理想、华为、特斯拉等企业已率先迈出了关键步伐,成功推送了“车位到车位”功能。其中,华为在2024年4月首次提出了这一概念,并将其ADS 3.0系统作为实现该功能的核心技术。随后,Momenta虽未直接采用“车位到车位”的表述,但也发布了“一段式端到端”量产智驾大模型,展示了其在该领域的深厚积累。

进入2025年,小鹏、极氪、小米、元戎启行等企业也蓄势待发,准备正式加入“车位到车位”功能的竞赛。这一功能旨在实现从起始车位到目的车位的全程智能驾驶,不仅大幅提升了智驾出行的场景覆盖度,还显著增强了智驾功能的连贯性和流畅度。
“车位到车位”功能的背后,是端到端智驾技术的激烈竞争。目前,业内普遍将端到端智驾技术分为一段式端到端和两段式端到端两种类型。尽管大部分企业仍处于两段式端到端的阶段,但一段式端到端被视为终极目标,2025年被视为冲刺之年。
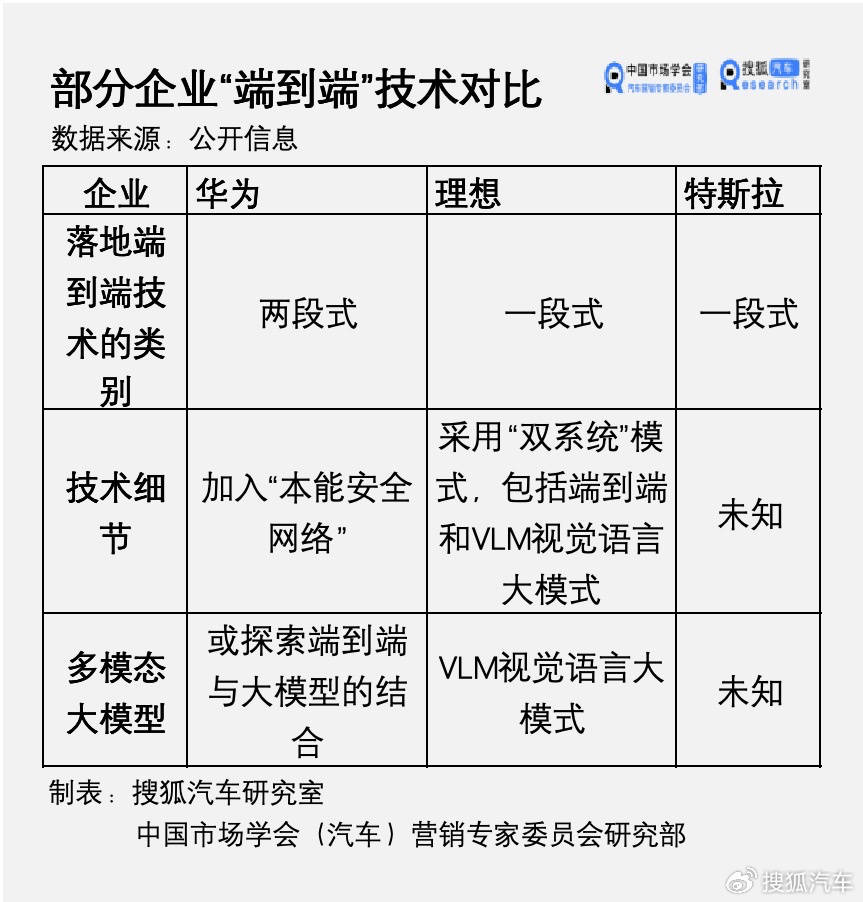
然而,技术路线的分歧也逐渐显现。华为、理想、特斯拉等企业在端到端技术的实现上各有千秋。华为采用的是两段式端到端架构,而理想则部分采用了一段式端到端。特斯拉虽然近年来对外披露信息较少,但有迹象表明其FSD Beta V12可能已采用了一段式端到端技术。华为正积极向一段式端到端努力,计划将其作为2025年的重点发展方向。
除了端到端技术本身的竞争外,多模态大模型也成为了新的技术焦点。VLM(视觉-语言模型)和VLA(视觉-语言-动作模型)等概念与端到端技术一同站在了技术的聚光灯下。理想的VLM和基于此进一步发展的VLA,以及地平线的World Model等,都在探索智能驾驶的未来发展路径。
在这场技术变革中,智能驾驶行业正经历着深刻的分化。一方面,头部车企和智驾企业如特斯拉、华为、理想等,正加速推进技术探索,不断取得新的突破;另一方面,第二阵营的智驾公司则面临着更为严峻的挑战,路线抉择将直接决定其生死存亡。
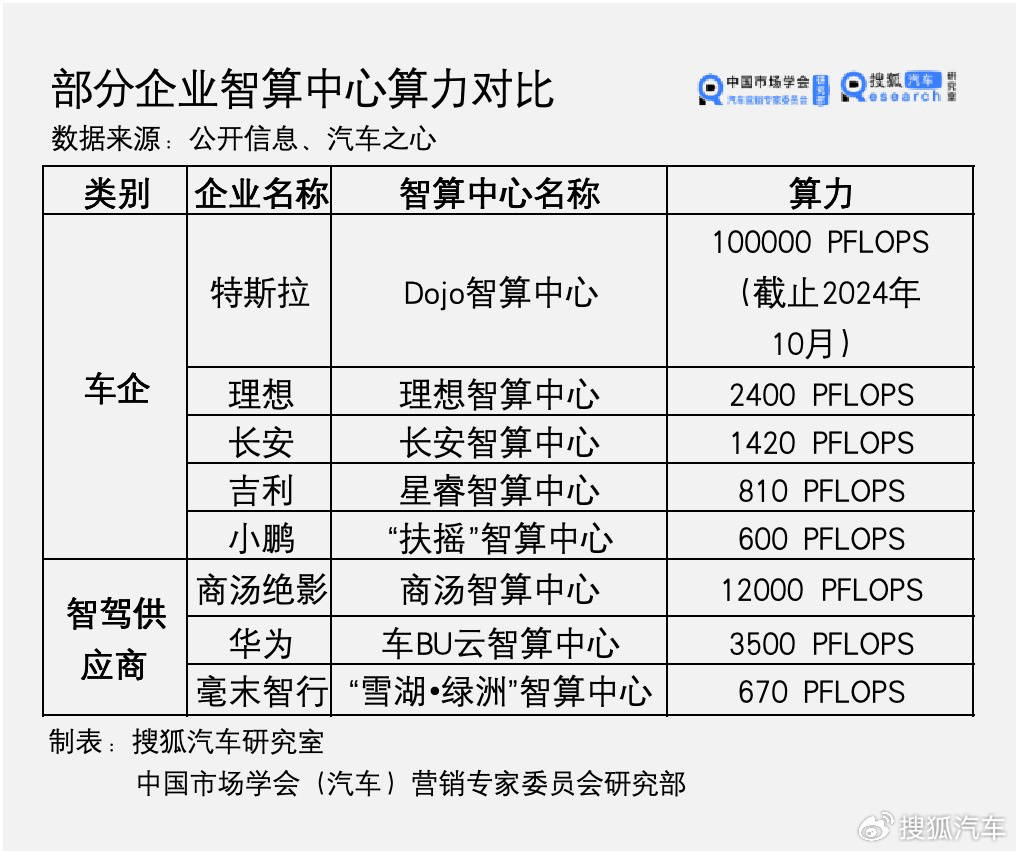
为了在激烈的竞争中脱颖而出,智驾企业需要做好充分的准备。领先的算法、足够大的算力以及海量丰富的数据,是取得成功的关键要素。算法方面,企业需要储备足够多的技术人才进行算法研发,以引领行业方向;算力方面,模型训练算力和车端算力都需要得到提升,以满足更优秀的模型的需求;数据方面,企业需要采集高质量的训练数据,并进行有效的迭代和优化。
企业还需要综合考虑成本和技术能力的平衡。一段式端到端技术的成本相对较高,所需的算力投入可能会显著增加;而分段式技术的成本则相对较低。因此,在选择技术方案时,企业需要权衡利弊,做出明智的决策。
总之,智能驾驶领域的竞争日益激烈,技术变革正在不断重塑行业格局。在这场没有硝烟的战争中,只有不断创新、勇于探索的企业才能立于不败之地。










