近日,具身智能领域的新兴企业RoboScience宣布成功完成了一笔数千万规模的种子轮融资,本轮融资由零一创投独家领投,资金将主要用于产品研发和团队扩建。
RoboScience由前苹果技术主管田野与新加坡国立大学助理教授邵林联手创立,于2024年正式成立。公司致力于研发全球领先的具身智能大小脑模型及产品,汇聚了多位产业专家和顶尖高校的科研人才。
田野,这位中科大物理系毕业并曾在斯坦福人工智能实验室深造的技术精英,曾是苹果总部最年轻的主任工程师之一。在苹果任职的七年时间里,他带领团队打造了苹果的机器学习平台,支撑了Siri、Apple Intelligence等AI应用和多个AI生态框架,推出了多项世界领先的端侧训练和推理技术,积累了将AI技术落地到软硬件产品的丰富经验。
而邵林,作为新加坡国立大学的助理教授,深耕具身智能领域,拥有丰富的学术背景。他曾在斯坦福大学师从Jeannette Bohg和Leonidas J. Guibas教授,并在2023年合作发表了提出SAM-RL方法的论文,入围了国际机器人顶会RSS的最佳系统论文奖。2024年,他带领团队提出了D(R,O) Grasp方法,通过创新性地建立机器手与物体在抓取姿态下的交互模型,实现了对机器手与物体几何形状的高度泛化能力,并极大提升了抓取速度,这一成果获得了CoRL MAPoDeL Workshop最佳机器人论文。
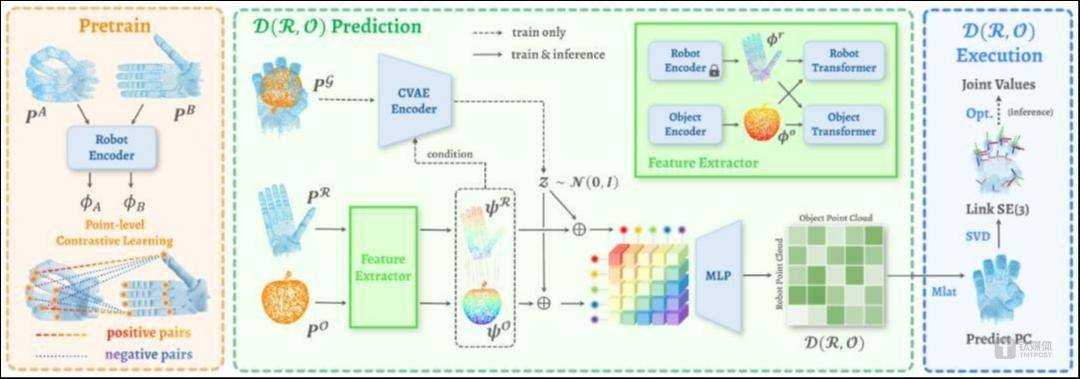
D(R,O) Grasp方法展示了其在抓取操作方面的卓越性能,与现有方法相比,该方法在操作成功率、姿态多样性以及计算速度方面均取得了显著提升,为灵巧抓取任务提供了新的解决方案。田野和邵林在斯坦福校园相识,多年来不断探索AI改造世界的方式,并最终在2024年上半年完成了思路验证,推出了Manipulation Foundation Model。
这一统一操作大模型成为了视觉语言大模型与物理世界的桥梁,完成了三个维度的泛化:能够指导任意的机器人,操作任意物体,完成任意任务。这一突破性的进展为RoboScience的成立奠定了坚实的基础。
从实验室走向商业化,RoboScience有着清晰的规划。基于其技术的高度泛化能力,RoboScience的产品将根据落地场景的具体需求,高效适配不同配置和性能的硬件,拓展落地场景、提升落地效率。这一开发路径的选择,基于RoboScience团队对于市场的深刻洞察。
随着具身智能的发展,未来不同场景下需要不同的硬件设备,很难用一个统一的硬件来覆盖所有任务。同时,背靠中国的供应链优势,硬件成本正在快速下降,此时推出通用操作的软件模型,有利于将供应链优势在具身智能领域快速发挥出来。软件研发迭代速度显著快于硬件,对于RoboScience这样在软件方面有丰富产业经验与学界技术支持的团队而言,与硬件厂商合作来做不同场景无疑是将优势最大化的选择。
在技术路线上,RoboScience从成立之初就坚定地选择了快慢脑分层模型,这与海外明星公司Figure的探索方向不谋而合。这一选择不仅基于团队对于技术的深刻理解和洞察,还源于对市场的敏锐把握和对未来趋势的准确预判。RoboScience相信,通过不断的技术创新和迭代升级,他们将能够为用户带来更加智能、高效和便捷的解决方案。