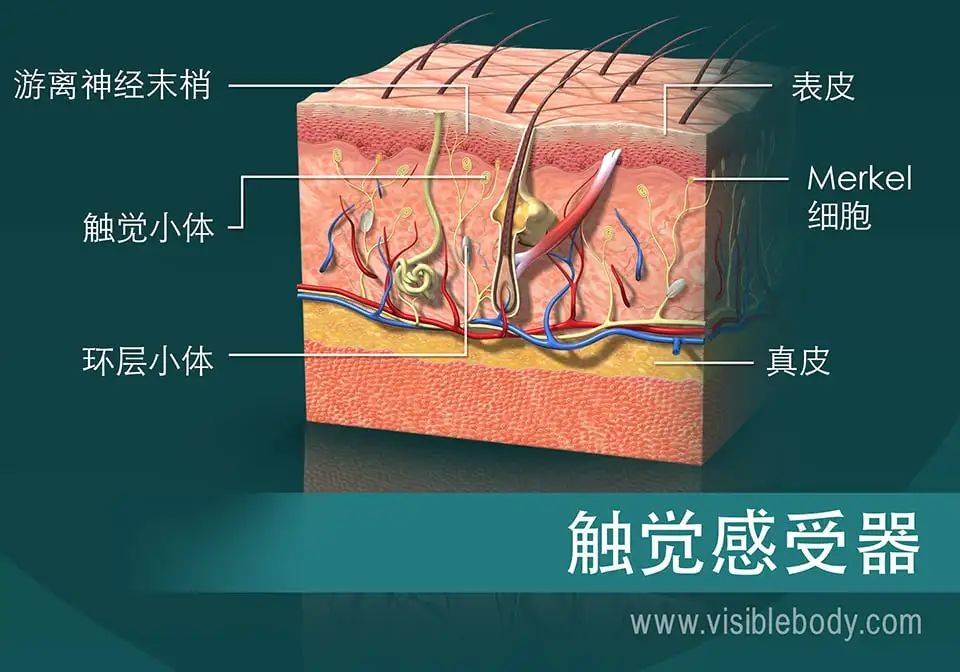
在探索机器人感知能力的边界上,一项源自实验室的创新技术正悄然改变游戏规则。想象一下,当你从冰箱中取出一枚鸡蛋时,指尖不仅能感受到它的椭圆形状和微妙重量,还能精确控制力度,避免捏碎或滑落。这种细腻的触觉控制,得益于我们指尖密布的触觉感受器,它们能捕捉多维度的力学信息。如今,机器人也朝着这一方向迈进,而视触觉传感器正是它们的“秘密武器”。
视触觉传感器,这一基于视觉的触觉感知装置,不同于传统的单维度力传感器。它能够同时感知法向力、剪切力、相对滑动以及物体的位姿,这些感知维度与人手触觉信息极为相似。其中,GelSight传感器作为这一领域的佼佼者,自2009年由MIT的Edward Adelson团队提出以来,便以其独特的弹性凝胶表面和内置摄像头设计,成为研究的热点。
GelSight的工作原理就像一个微型的“接触成像系统”。当物体接触传感器表面时,弹性材料会根据接触力产生形变,这些形变通过特殊设计的光学系统和高分辨率摄像头被捕捉并放大,转化为清晰的图像。这些图像经过深度学习算法的处理,能够重建出接触表面的三维压力分布图,甚至识别出物体的精细纹理,如指纹、布料织纹等。
随着技术的演进,视触觉传感器已经从实验室的概念验证走向实用化应用。早期,MIT团队通过构建触觉纹理数据库,证明了视触觉传感器在物体特性识别上的潜力。随后,该技术与机械臂的集成,实现了对小型零件的精确定位与操控,特别是在USB接口插拔等精细操作任务中,显著提高了成功率。
近年来,视触觉传感器技术不断迭代,多种改进版本应运而生。英国布里斯托大学的TacTip采用仿生设计,模拟人类指尖皮肤下的机械感受器;UC Berkeley的OmniTact则实现了弯曲表面的全方位触觉感知。商业化产品如GelSight,也具备了精细纹理和稀疏切向力感知的能力。
然而,行业创新并未止步。面对专利壁垒、技术瓶颈和应用场景的多样化需求,更加多元的技术路线正在涌现。其中,一种基于单色光的图案追踪原理的技术路线备受瞩目。这种方案通过捕捉密闭光场中弹性材料上图案的形变特征,结合解析算法实现触觉感知,不仅降低了算力要求和生产成本,还显著提高了传感器的耐用性和小型化程度。
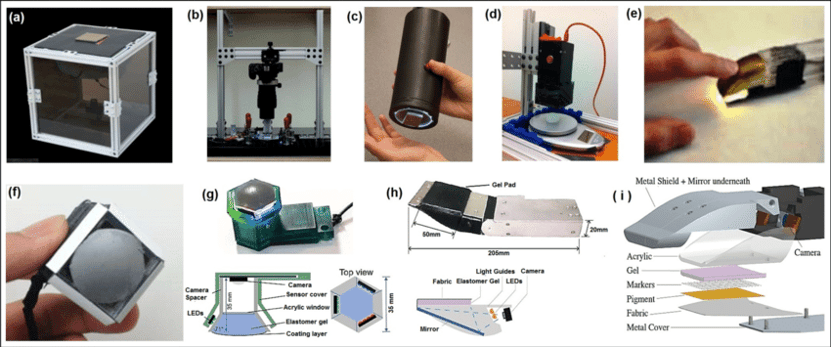
戴盟机器人便是这一技术路线的代表企业,其最新发布的视触觉传感器DM-Tac W,每平方厘米覆盖4万个感知单元,是当前最密集的阵列式触觉传感器的数百倍。该传感器已应用于工业自动化、消费电子、智慧物流等多个场景,展现了强大的市场潜力。
从应用前景来看,视触觉传感技术正在渗透到多个专业领域。在工业自动化领域,它使协作机器人能够轻柔地处理易碎物品,执行精密装配任务;在医疗领域,手术机器人配备视触觉传感能力后,可以更精确地感知组织特性;在工业检测中,它能识别肉眼难以察觉的表面缺陷;在可穿戴设备和虚拟现实领域,它提供真实的触觉反馈,增强了虚拟环境的沉浸感。
尽管视触觉传感技术展现出巨大潜力,但投资者仍需警惕潜在风险。目前,该领域尚未形成标准的大规模数据集和专门的触觉大模型,这限制了技术的发展。传感器的耐用性、功耗和成本问题,以及感知面积的限制,都是亟待解决的技术挑战。
然而,随着材料科学、微电子技术和人工智能算法的持续进步,这些挑战有望被一一克服。未来,视触觉传感器将更加小型化、低成本化,并具备更高的耐用性和精度。当这些技术突破汇聚时,我们或许将见证一个更具温度的人机交互时代——机器人手指能像人类一样轻柔地拾起花瓣,精准地完成各种精细操作。