在国内汽车圈,口水战似乎已成为一种常态,特别是在智能辅助驾驶领域,各大车企纷纷不遗余力地自我标榜,相互贬低,以期在这场技术竞赛中脱颖而出。近期,理想与小鹏两大品牌再度围绕VLA技术路线展开了激烈的交锋,为我们提供了一个深入了解其智驾营销战的契机。
自动驾驶行业长久以来便充斥着浮夸之风,这股风气很大程度上可以追溯至马斯克对FSD技术的过度宣扬。自此之后,国内车企似乎找到了新的营销灵感,纷纷以特斯拉为标杆,通过夸大其词的技术宣传来吸引消费者目光。
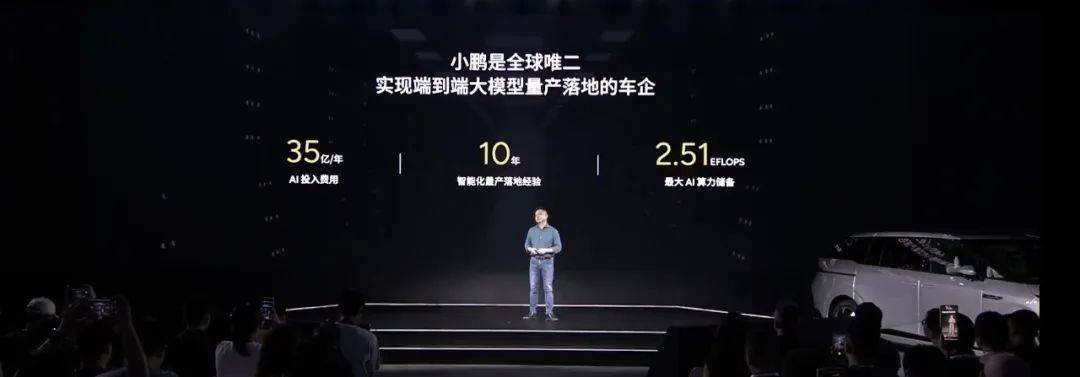
2024年,理想与小鹏在端到端技术的营销上再次狭路相逢。双方均声称自己是全球范围内仅次于特斯拉,率先实现端到端大模型量产落地的本土车企。这种“世界唯二/全球唯二”的宣传策略,无疑是在借特斯拉之名,行自我推销之实。
同年7月,理想汽车宣布推出端到端无图NOA方案,随后小鹏汽车CEO何小鹏紧跟步伐,宣布小鹏同样实现了端到端大模型的量产落地。双方还就实车数量能否决定端到端方案的性能,以及谁率先部署一段式端到端等问题展开了激烈的争论,这场口水战无疑为汽车爱好者们提供了不少茶余饭后的谈资。
在中国自动驾驶产业的发展历程中,理想与小鹏无疑占据了重要地位。2024年,这两家新势力车企率先落地了一段式端到端方案,并在2025年争相训练和部署基于生成式AI的VLA智驾大模型。然而,由于架构设计、训练方法、数据配比等方面的差异,两家车企的VLA大模型也呈现出显著的不同。
其中,实车部署时是否采用端云结合路线成为了双方争论的焦点。小鹏汽车自动驾驶产品高级总监明确表示,所有与控车相关的VLA都必须部署在车端,以避免网络延迟带来的安全风险。而理想汽车则采用了端云一体的路线,通过云端基座模型处理复杂任务语音指令。
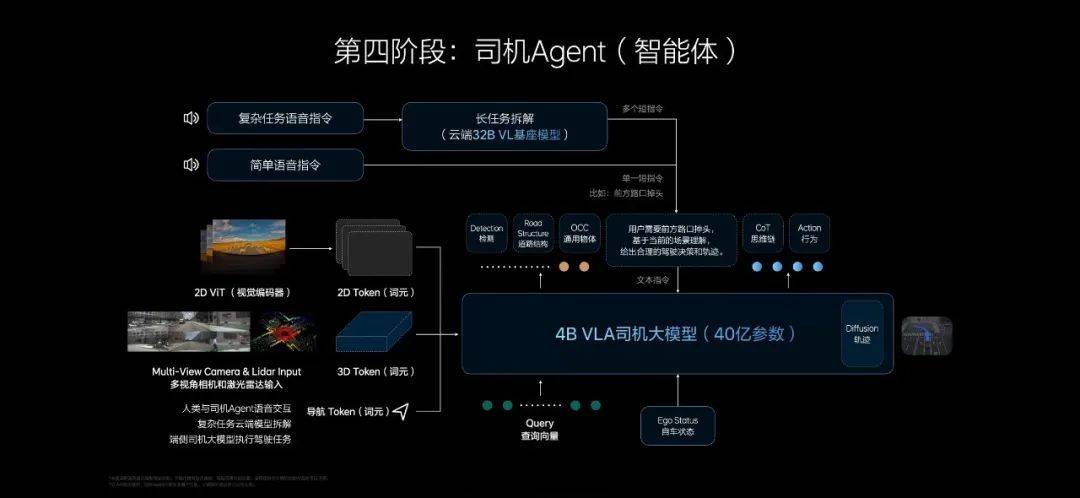
在VLA模型的训练和推理方面,理想与小鹏同样采取了不同的策略。小鹏汽车将云端模型工厂划分为四个车间,依次进行基座模型的预训练、后训练、模型蒸馏以及车端部署。而理想汽车则先进行视觉语言基座模型的预训练,再进行模型蒸馏,最后通过驾驶场景数据进行后训练和强化学习,并将最终的司机Agent进行端云部署。

两种路线各有千秋,小鹏的做法更符合智能涌现的规律,能够大幅提高云端大模型的上限,但训练成本较高且需要更多算力资源。而理想汽车的路线则能够弥补蒸馏过程造成的能力损失,且训练成本低、效率高,但可能不会触发智能涌现。

在这场技术路线的较量中,谁将更胜一筹,目前尚难定论。但无论如何,理想与小鹏的结合预训练和强化学习的策略,无疑为行业树立了新的标杆。至于谁才是行业第一,哪个是更好的技术路线,或许只有等待市场和时间来给出最终的答案。