在硬件技术的迅猛推动下,四足机器人在动力与速度领域取得了显著进步。尤其是强化学习等先进技术的应用,极大地增强了这些机器人在复杂环境中的移动控制稳定性。这一进展使得四足机器人在物资运输、环境探索等自动化任务中展现出了巨大的应用潜力。
然而,面对地形复杂、地势起伏剧烈的环境,四足机器人往往需要具备垂直移动的能力。例如,在灾难现场或未开发的自然环境中,倒塌的建筑物和岩石构成了高度变化极大的障碍。遗憾的是,现有的四足机器人大多擅长水平移动,而专为垂直移动设计的机器人则因结构过于特殊,在水平移动时显得笨拙。因此,能够稳定完成这类动作的机器人及其控制方法仍处于发展阶段。
近日,东京大学的Keita Yoneda研究团队成功研发出一款名为KLEIYN的四足机器人,该机器人在垂直攀爬方面取得了突破性进展。KLEIYN的核心亮点在于其配备的主动腰部关节,这一设计显著提升了机器人在狭窄墙壁上的跟踪能力和攀爬性能。通过创新的课程学习(Contact-Guided Curriculum Learning)方法,研究团队引导机器人逐步掌握了攀爬技巧,实现了水平移动与垂直攀爬的完美结合。

实验结果显示,KLEIYN能够成功攀爬宽度在800毫米至1000毫米之间的墙壁,并以平均150毫米/秒的速度进行。与传统同类机器人相比,KLEIYN的速度提升了近50倍,这一突破无疑为四足机器人在复杂环境中的应用开辟了新道路。
KLEIYN之所以能够实现既能在平地稳健行走,又能在高墙灵活攀爬,关键在于其腰部关节的创新设计。这款机器人体重18千克,体长760毫米,站立高度400毫米,紧凑的体型为其在狭窄空间内的灵活活动提供了基础。全身共有13个自由度(DOF),每条腿3个自由度,躯干部分1个自由度,使其既能完成基础动作,又能适应复杂地形。
在腿部结构上,KLEIYN借鉴了开源金属四足机器人MEVIUS的优势,每条腿包含肩胛骨连杆、大腿连杆和小腿连杆三个部分,通过关节连接。所有腿部关节均由减速比为1:10的电机驱动,最大扭矩可达25牛米,为行走和攀爬提供了充足动力。躯干部分则包括前体连杆和后体连杆,两者结构相同,内部容纳了车载电脑、电池等核心部件。连接这两部分的腰部关节可沿俯仰轴旋转,使躯干实现弯曲动作,为机器人在狭窄墙壁间的攀爬提供了关键灵活性。
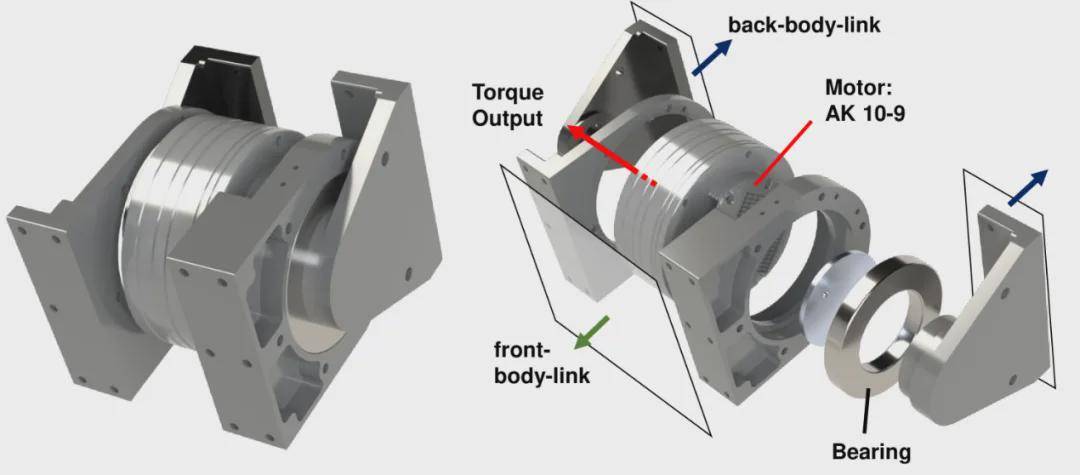
KLEIYN的腰部关节采用单自由度旋转结构,框架由精密加工的铝材制成,并通过预仿真应力分析验证了强度。为增强刚性,关节采用双支撑结构,在电机输出轴的对侧设置轴承分担负载。电机输出通过1:9的低减速比齿轮以准直接驱动方式传递到旋转轴,保证了动力传输的高效性,并为课程学习中的“仿真到现实”迁移提供了便利。为满足攀爬场景中承受左右腿合力的需求,腰部关节还配备了最大扭矩48牛米的电机,确保在负载集中时也能稳定支撑机身完成动作。
依托创新的课程学习控制策略,KLEIYN从零基础逐步掌握了高难度的攀爬技能,并能灵活应对不同场景的挑战。其核心采用“Actor-Critic”架构,训练时执行者输出动作,评估者评估动作优劣并优化策略;实际作业时仅启动执行者,以50Hz频率精准控制关节运动。配合传感器系统,机器人能实时感知关节状态、自身姿态,并接收指令,为学习提供基础。
研究团队针对垂直攀爬的特性,提出了接触引导课程学习方法,让机器人在墙与地面的弧形连接处学习支撑发力,再逐步过渡到垂直墙壁。同时,在模拟器中设置多样场景,增强机器人的适应力。在学习过程中,非对称策略优化了训练效率,评估者同步掌握更多隐藏参数,更精准地评判动作合理性。精细化的奖励机制则引导机器人在试错中掌握省力稳定的攀爬技巧。
在模拟环境中,KLEIYN凭借课程学习掌握了高效攀爬策略,成功攀爬未经过训练的窄墙,证明了课程学习的泛化能力。接触引导课程学习的有效性也得到了验证,通过循序渐进的课程设计提升了学习效率。算法与机械结构的协同让攀爬效率倍增,有腰关节的机器人在窄墙上的表现更好,摆动阶段的反冲速度更显著。
在真实世界中,KLEIYN展现了卓越的攀爬能力,在800毫米、900毫米、1000毫米宽的墙壁上稳定攀爬,速度远超传统机器人。面对干扰,它能快速调整姿态重新稳定,展现出抗干扰能力。同时,它在台阶上下行走及不平坦石面的打滑恢复,证明了课程学习策略可有效迁移到真实运动场景,实现了攀爬与行走的双模式整合。




