近期,理想汽车在其AI Talk活动中宣布了一项重要成果:四篇关于自动驾驶模拟仿真的论文成功入选行业权威期刊。这些论文由理想汽车副总裁、智能驾驶负责人朗咸朋及其团队的多位工程师共同撰写,展示了理想汽车在自动驾驶技术领域的最新突破。
这四篇论文——《StreetCrafter》、《DrivingSphere》、《DriveDreamer4D》和《ReconDreamer》,聚焦于解决自动驾驶研发中的两大核心难题:高昂的数据成本和极端场景覆盖不足。通过创新的技术手段,理想汽车为自动驾驶的模拟仿真提供了全新的解决方案。
首先,《StreetCrafter》论文提出了一种基于LiDAR与视频扩散模型的街景合成技术。该技术通过融合LiDAR点云与视频扩散模型,解决了传统方法在视角偏离训练轨迹时渲染模糊或产生伪影的问题。其核心包含可控视频扩散模型和动态3D高斯表示蒸馏两部分,能够实时渲染和编辑场景,显著提升了渲染质量和视角外推能力。实验结果显示,在Waymo数据集上,StreetCrafter在3米视角偏移下的表现显著优于传统方法,为自动驾驶训练降低了对真实数据的依赖。

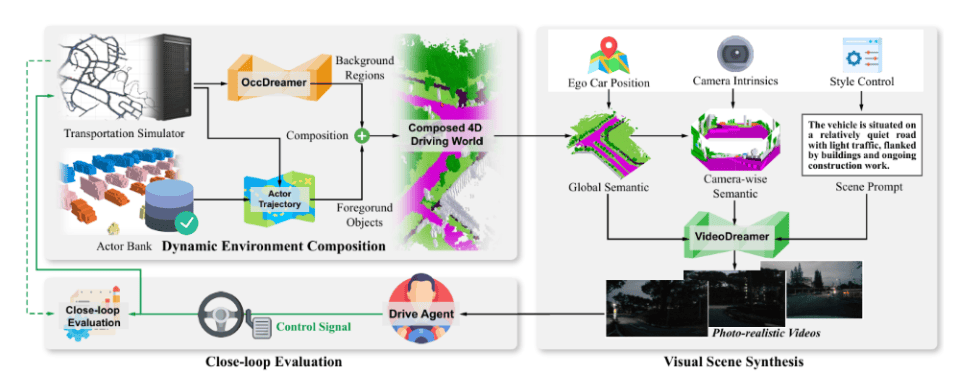
接着,《DrivingSphere》论文构建了一个支持动态闭环交互的4D仿真环境。该环境通过动态环境组合(DEC模块)和视觉场景合成(VSS模块),以及闭环反馈机制,为智能体构建了高保真4D世界,用于评估自动驾驶算法。实验表明,DrivingSphere在视觉保真度评估中表现出色,生成的场景和视频在多个指标上超越了现有方法,为自动驾驶的闭环仿真提供了有力的支持。
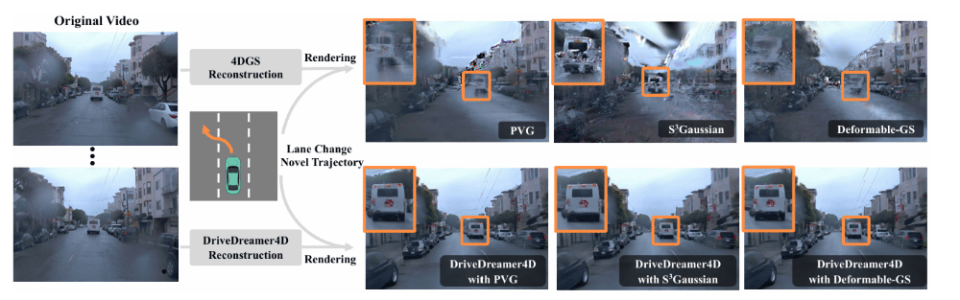
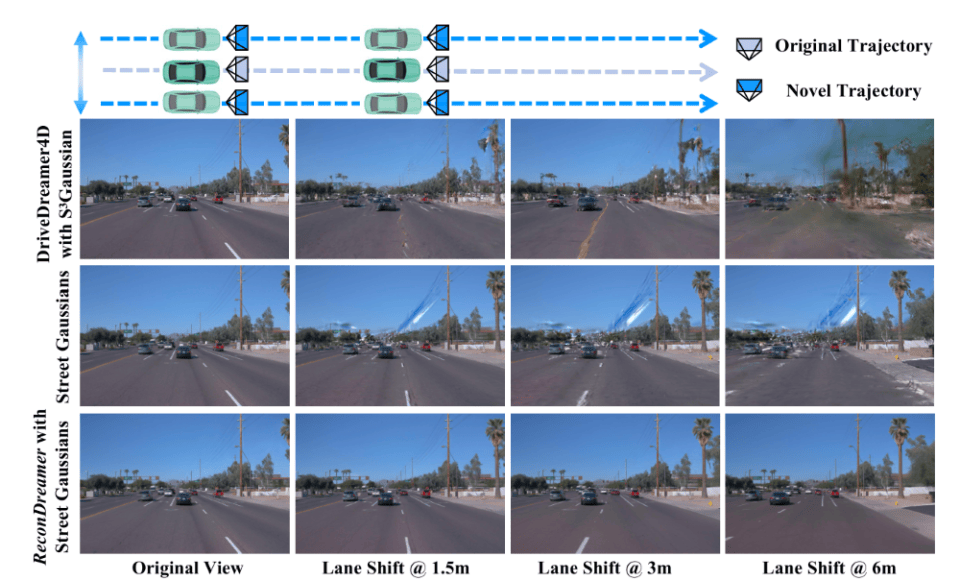
《DriveDreamer4D》论文则致力于通过世界模型增强4D驾驶场景重建的时空一致性与生成质量。该技术通过新轨迹生成模块和正则化训练策略,解决了传统传感器仿真方法在复杂动作下的局限性。实验表明,DriveDreamer4D在时空一致性和视觉真实性上优于基线模型,为自动驾驶算法的训练和测试提供了高质量的仿真数据。
最后,《ReconDreamer》论文聚焦于解决动态场景重建中大幅动作导致的伪影问题。该技术利用世界模型的知识,通过在线修复和渐进式数据更新策略,实现了实时修复渲染缺陷,并解决了大动作渲染中的数据分布偏移问题。实验结果显示,ReconDreamer在多个评估指标上显著优于基线方法,为自动驾驶闭环仿真提供了高保真传感器数据生成方案。
这些论文的发表不仅展示了理想汽车在自动驾驶技术领域的深厚积累和创新实力,也为自动驾驶技术的未来发展提供了重要的参考和借鉴。随着这些技术的不断成熟和应用,自动驾驶技术将更加安全、可靠和高效,为人们的出行带来更多便利和舒适。