通用机器人领域的创新浪潮再次涌动,傅利叶智能公司近期震撼发布了其首款开源人形机器人——Fourier N1,并慷慨地分享了详尽的制造与控制资源。
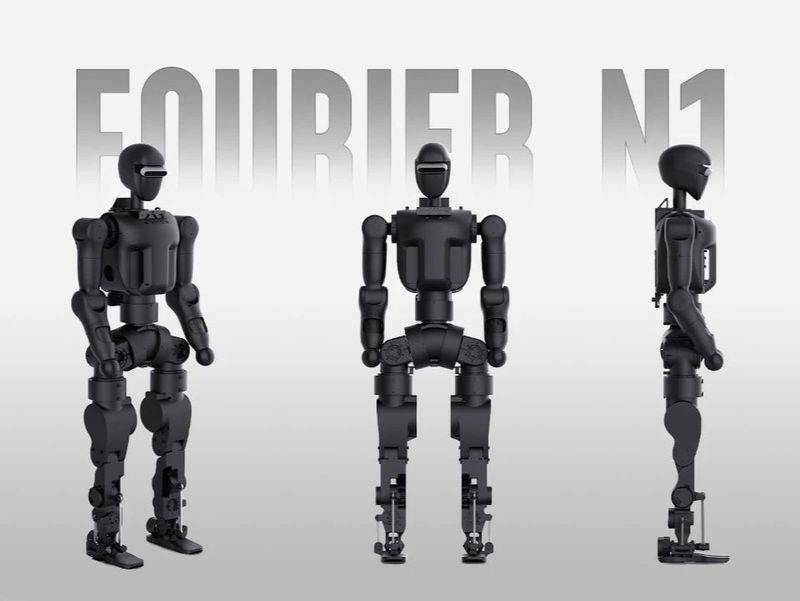
这款身高1.3米、体重38公斤的Fourier N1,采用了紧凑且坚固的硬件架构,全身23个自由度赋予其灵活的姿态控制能力。机体巧妙融合了铝合金与工程塑料,不仅确保了结构的强度,还兼顾了关节的灵活性。背部设计的插拔式电池,更是让其在单次充电后能够持续运动超过两小时,完美适应高频测试与快速部署的需求。
动力系统方面,Fourier N1搭载了傅利叶自主研发的FSA 2.0一体化执行器,配合先进的控制系统,实现了运动稳定性与抗冲击能力的双重提升。在性能测试中,Fourier N1展现出了惊人的运动能力,最高稳定奔跑速度达到了3.5米/秒,这无疑是对其卓越性能的最好证明。
为了让更多开发者能够参与到人形机器人的研发中来,傅利叶智能提供了全面的开源资源。这包括详细的物料清单、可直接用于加工的结构图纸、详尽的装配指南以及操作演示视频,构成了一套完整的硬件制造体系。基础控制系统也一并开源,包括在GitHub上公开的基础操作软件代码及通讯接口封装,为开发者提供了极大的便利。
为了更进一步支持开发者,傅利叶智能还推出了Fourier-GRX SDK。这是一款基于Python语言的软件开发工具包,专为安装、配置和控制傅利叶智能的机器人产品而设计。SDK的设计简洁直观,提供了高级接口来控制机器人运动并读取传感器数据。开发者可以通过访问Fourier-GRX SDK的官方网站,轻松获取快速入门指南、示例代码、详尽的API文档以及常见问题解答。
Fourier-GRX SDK已在Ubuntu 22.04 LTS系统上通过了测试,并支持Python 3.11环境。同时,SDK也兼容Windows和MacOS系统,尽管后两者的测试情况尚未明确。SDK提供了User和Developer两类接口,User接口基于Zenoh协议开发,无明确的平台和语言限制,但推荐在Ubuntu系统上进行开发;而Developer接口则基于Python库开发,更适合进行深入的二次开发。