在智能驾驶领域,一场技术革命正悄然进行。多家领先企业,包括理想、小鹏及新兴企业元戎启行,纷纷选择了在车辆端部署VLA(视觉语言动作模型)技术,以此作为推进智能驾驶的关键策略。
元戎启行的CEO周光在2025年4月预测,VLA技术很可能在不久的将来成为业界的共识。这一观点得到了理想汽车创始人李想的支持,李想在随后的5月表示,理想汽车的VLA战略正是为了实现AI独立完成专业工作的目标。
VLA技术与世界模型在车辆端的应用,虽然都具备理解环境和做出推理判断的能力,但它们的运作方式有所不同。世界模型会进行多种可能性的推演,而VLA则直接根据推理结果做出行动。这种差异使得VLA在决策和执行上更为直接和高效。
尽管技术路径有所不同,但企业在推进端到端智能驾驶系统的过程中,底层的思考逻辑是一致的。随着车位到车位功能的逐渐普及,企业开始将功能差异化的布局逐渐转向安全性能的提升。

蔚来汽车基于世界模型推出的首个辅助驾驶系统版本,被视为是对智能驾驶乱象的一次有力回应。这一版本对安全的重视,反映了社会对辅助驾驶需求的现实。2025年被称为“全民智能驾驶元年”,多家车企宣布将加大智能驾驶的普及力度。
然而,在智能驾驶快速发展的背后,安全问题也日益凸显。小米SU7严重交通事故的发生,引发了社会对智能驾驶安全性的广泛讨论。事故中,AEB自动紧急制动功能未启动,使得主动安全功能的优劣成为舆论关注的焦点。

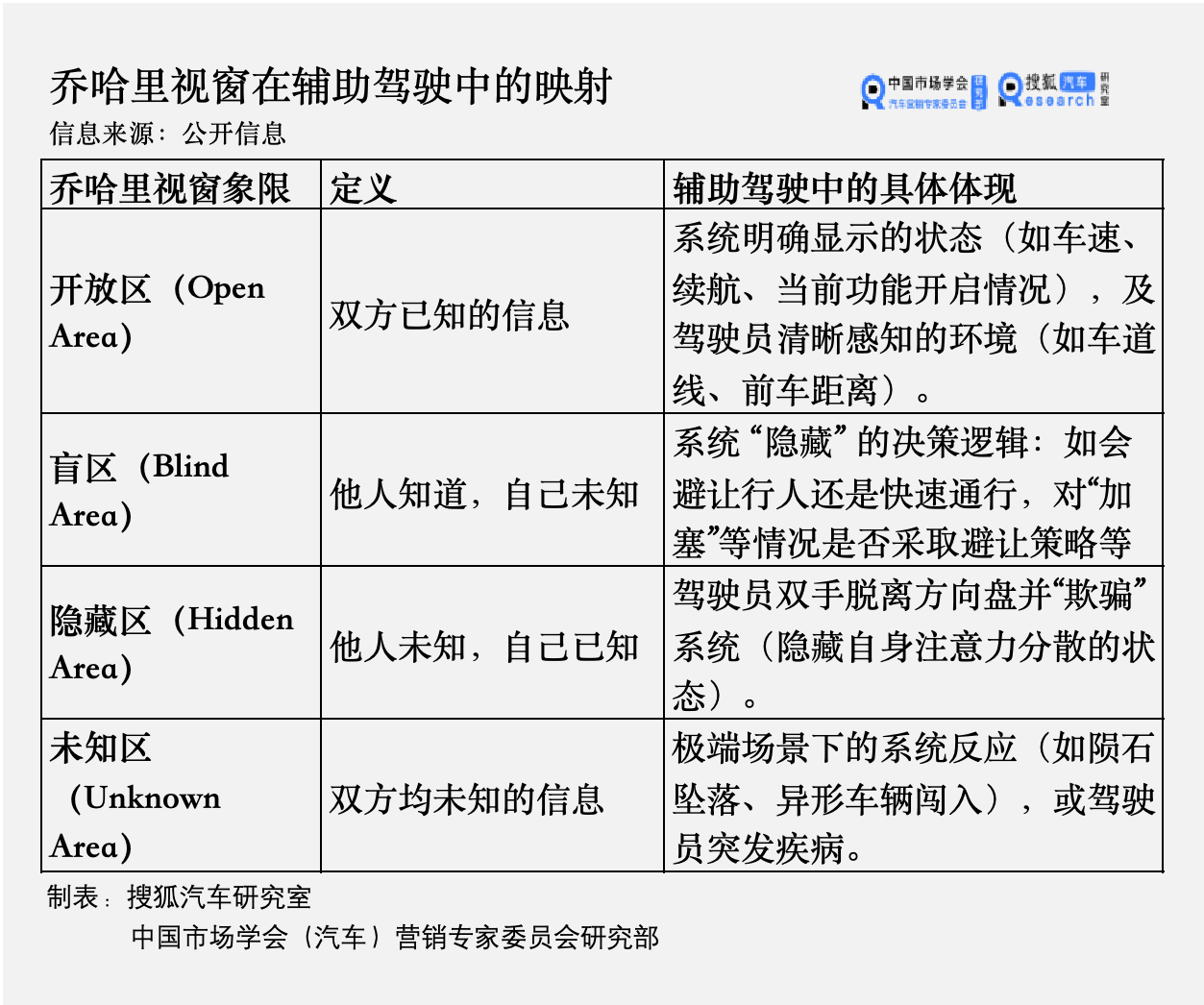
除了主动安全功能外,人机交互中的安全问题也不容忽视。在L2级智能驾驶的人机共驾时代,辅助驾驶系统与人类驾驶员之间的信息差可能会影响双方的判断和决策。这种信息差可能引发驾驶员的焦虑情绪,甚至在紧急情况下导致危险的发生。
在蔚来世界模型的体验过程中,搜狐汽车遇到了多次因信息差导致的紧急刹车情况。例如,在车辆即将驶出匝道口时,驾驶员因担心车辆与匝道护栏刮擦而选择刹停;在车辆探测到行人后减速但未刹停时,驾驶员也因不确定车辆意图而选择刹停。这些情况都反映出驾驶员对车辆推理和决策逻辑的不了解。
然而,蔚来世界模型在自由交互寻路功能中的表现却令人印象深刻。车辆会在屏幕上高亮识别到的文字,并以文字方式呈现寻找出口的思考逻辑和下一步行驶动作。这种透明的沟通方式极大地增强了驾驶者的安全感和信任度。
尽管目前这一功能仅在停车场场景开放,且行车过程中系统的决策更为复杂,但人机交互无疑已成为智能驾驶发展中无法忽视的命题。如何在保障安全的同时,提升人机交互的效率和透明度,将是未来智能驾驶领域需要重点解决的问题。