在2025年世界人工智能大会(WAIC)的盛大舞台上,北京人形机器人创新中心(简称“北京人形”)带来了一场科技与工业的精彩碰撞。会上,该中心隆重发布并现场演示了全国首例工业级“多本体、多场景、多任务自主协同作业”系统,这一创新成果建立在他们自主研发的“慧思开物”通用具身智能平台之上。
此次发布的系统标志着具身智能技术迈出了重要一步,从单一的场景与任务验证,跨越到了具备分布式协同、多模态交互及动态适应能力的工程实践阶段。北京人形因此成为了国内首个成功展示此类全链路公开演示的研发机构。
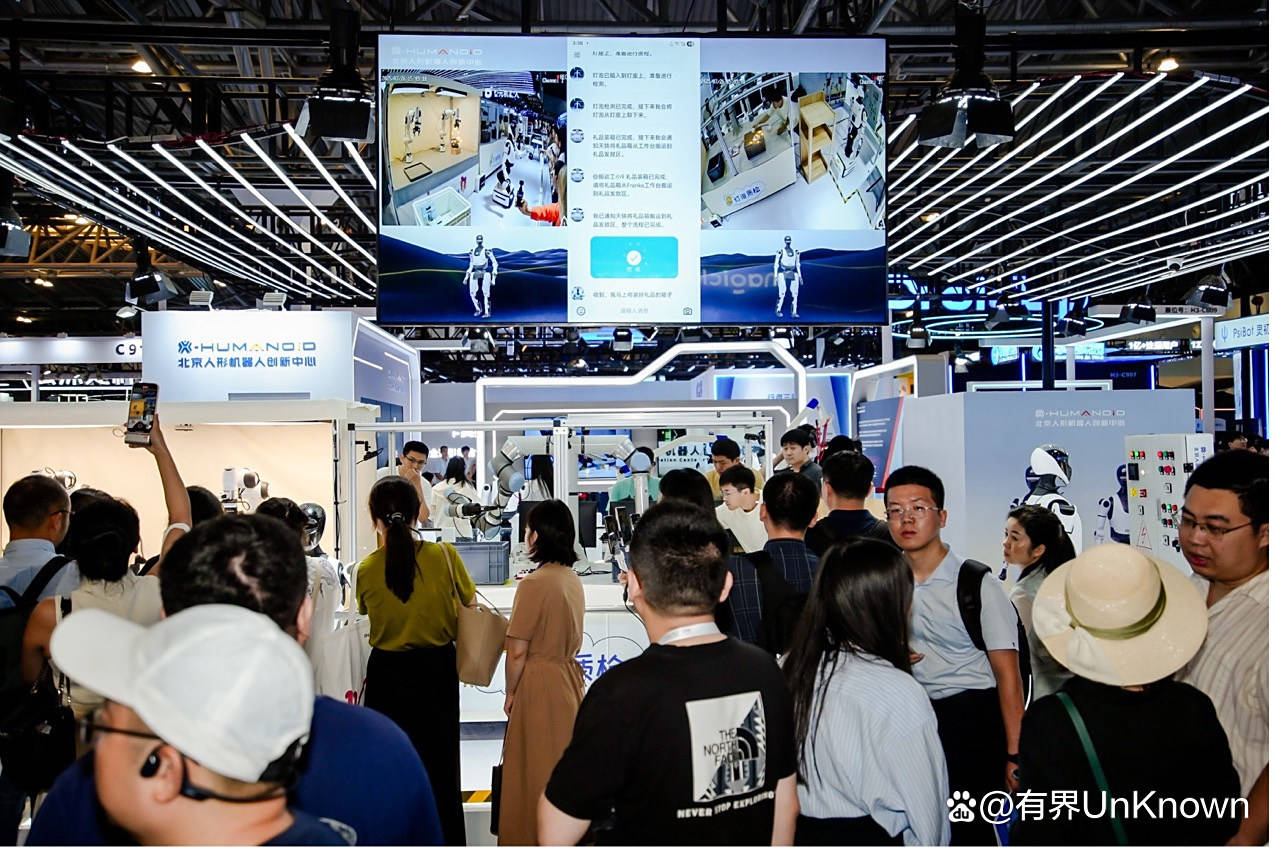
在WAIC的展区,北京人形精心搭建了一条模拟工业生产线,四台机器人分别负责电控柜操作、灯泡质检、封装和搬运任务,它们如同“电工大师”、“质检员”、“封装助手”和“搬运工”,通过“慧思开物”平台的智能体系统实现任务的自主分解与调度。用户只需在App上轻点“开始”,系统便能根据实时场景、任务优先级和资源状况,异步分发多项任务,实现认知到执行的无缝衔接。
尤为这一系统打破了传统同步工作流的束缚,实现了多智能体的并行处理、异步操作、状态感知与自然语言沟通,构建起了工业级的“任务执行网络”。这一切的背后,得益于“慧思开物”平台的多智能体大脑架构和任务调度中枢,确保了每个机器人既能独立认知、局部决策,又能在全局规划下协同作业。
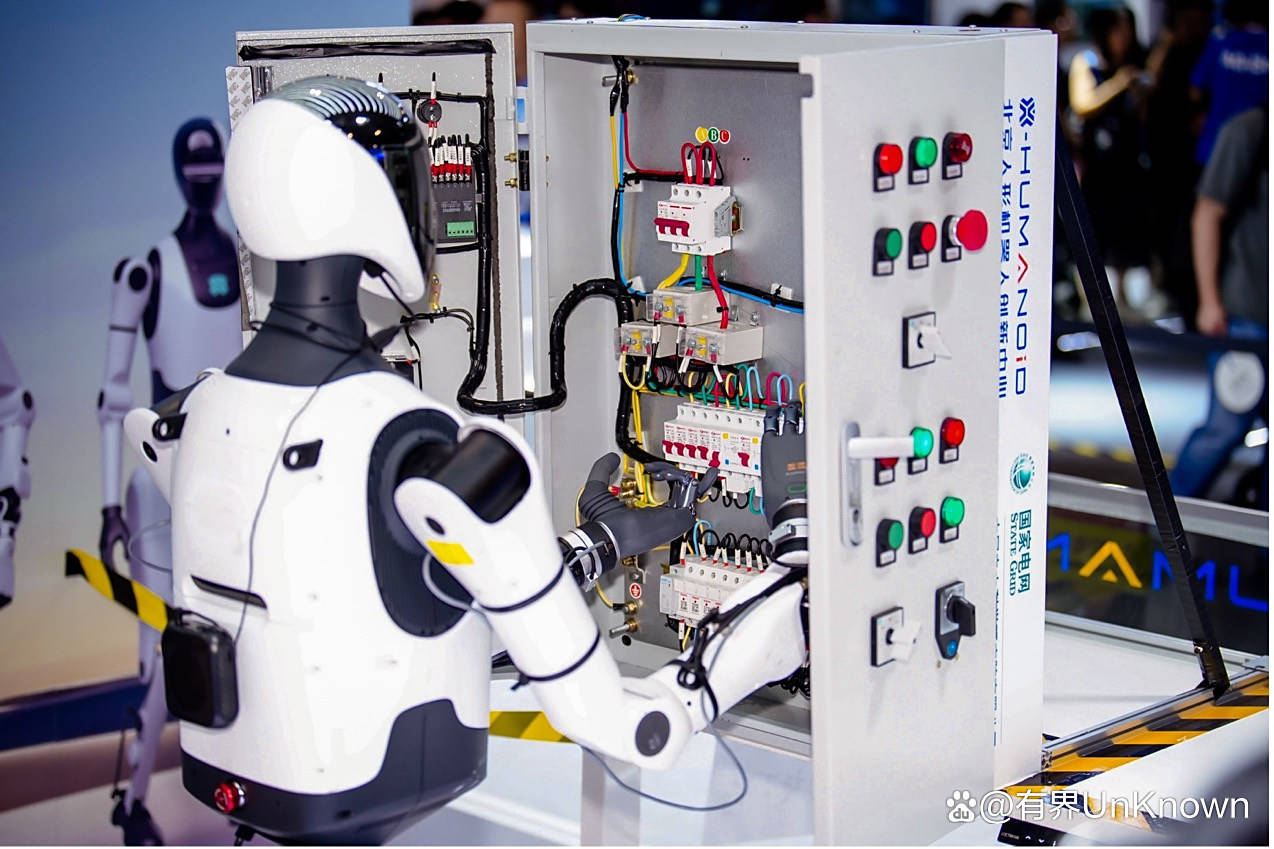
在现场演示中,机器人所完成的复杂作业并非预设编程,而是在动态、多变的环境中实时感知、自主操作。以电控柜操作为例,机器人能够自主完成开柜、旋钮点按、合闸等精细动作,这得益于35自由度高运动控制系统与自研VLA(视觉-语言-动作)模型的协同工作,通过对人类演示的多模态数据进行学习,机器人具备了“视觉-触觉-动作”的协同能力,能够实时感知微观物理变化并进行操作调整。
在灯泡质检场景中,机器人不仅完成了抓取、插装、点亮等标准流程,还通过高精度视觉系统与VLM大模型,对光效细节进行了准确分析。整个作业过程基于三维环境感知与力位混合控制技术,双臂灵活避障、稳定施力,确保了插装过程的安全与精准。同时,系统能够根据质检结果实时调整任务规划,实现了“检测—分拣—搬运”的闭环管理。
除了工业智能体系统,北京人形的“天工2.0”与“天工Ultra”人形机器人也亮相展区。其中,“天工2.0”以其高动态舞蹈演示吸引了众多目光,全身42自由度的关节系统支持高频率、大幅度的姿态控制,展示了国际领先的全身动态控制能力。而“天工Ultra”则以其稳定性和节能控制表现赢得了广泛关注,曾在亦庄马拉松完成半程跑步的它,此次线下展出更是让人眼前一亮。
在推动技术落地的过程中,北京人形还持续投入于数据基础设施建设。现场的数据演示区让观众能够亲身体验同构臂遥操作系统,控制仿真机器人完成高保真复现,并同步采集操作数据进行结构化存储,为模型的训练和策略优化提供了有力的数据支持。此前开放的具身智能数据集RoboMIND,也已成为行业研究的重要资源,下载量已突破4万次。
此次WAIC的展示,不仅彰显了北京人形在具身智能领域的工程能力,更预示着一个由多智能体自主协同驱动的未来工业系统的到来。随着具身智能平台的普及、协同技术的成熟以及任务成功率的提升,中国在智能机器人产业的快速发展已指日可待。