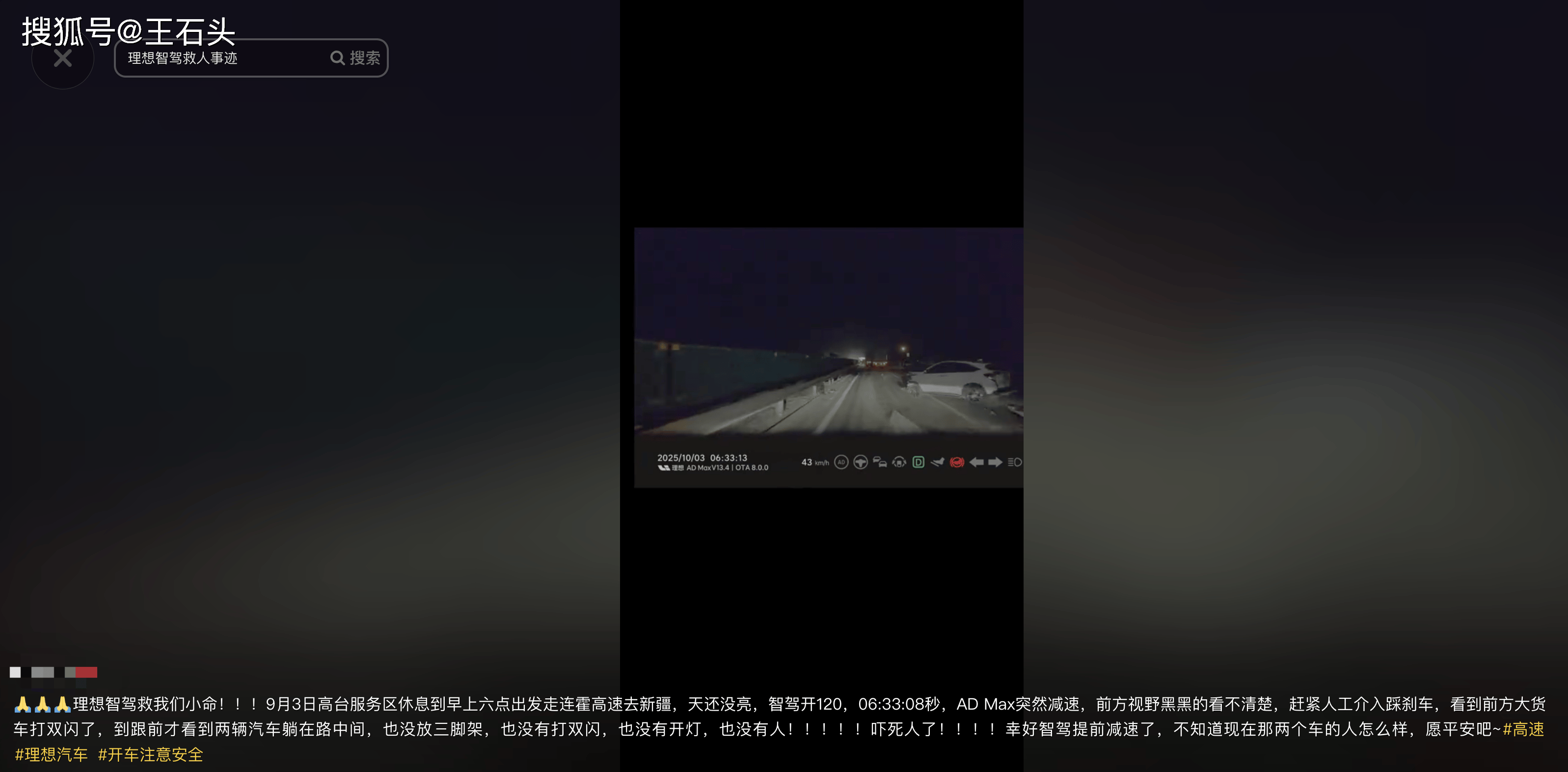
清晨的高速公路上,一场惊险的危机被智能驾驶系统悄然化解。当大多数人还在沉睡时,一辆理想汽车正以120公里的时速在连霍高速上平稳行驶。突然,车辆在毫无预兆的情况下自动减速,驾驶员本能地踩下刹车,这才发现前方百米处的道路中央竟横躺着两辆事故车辆。
这辆搭载AD Max智能驾驶系统的理想汽车,之所以能在黑暗中提前感知危险,得益于其配备的激光雷达与毫米波雷达组合。在黎明前的低能见度环境下,这套系统在200米外就探测到了静止的障碍物,而人类驾驶员的肉眼此时几乎无法看清前方路况。这种超越人类感官的探测能力,正是智能驾驶技术最核心的安全价值。
事件发生时的具体数据令人震撼:系统在06:33:08开始自动减速,此时车辆距离障碍物尚有相当距离。若换成纯人工驾驶,在120公里时速下,驾驶员从发现障碍到做出反应的时间往往不足3秒,而理想AD Max系统通过多传感器融合技术,将反应时间压缩至毫秒级。这种技术优势在低光照环境中尤为显著——即便在白天,人类驾驶员也很难在如此距离发现静止车辆。
该事件经网络传播后引发广泛讨论。有网友指出,若没有智能驾驶系统的介入,以当时的车速发生碰撞,极可能造成人员伤亡。但技术专家同时强调,尽管此次AD Max系统表现出色,现阶段的智能驾驶仍属于辅助性质。理想车主在系统预警后立即采取人工制动,这个细节暴露出当前技术的重要边界:智能系统需要人类驾驶员的持续监督。

从技术原理看,智能驾驶系统通过摄像头、雷达等设备构建的感知网络,确实在特定场景下超越了人类感官。毫米波雷达能穿透雾气,激光雷达可精确建模三维空间,这些特性使系统在黑暗、雨雪等恶劣环境中保持稳定性能。但现阶段技术仍存在局限,比如对复杂交通场景的判断、突发状况的处理等,都需要人类驾驶员的最终决策。
这起事件完美诠释了智能驾驶的"副驾"定位。它不会取代驾驶员,而是在关键时刻提供安全冗余。当系统检测到风险时,会通过减速、警示等方式提醒驾驶员;当系统处理能力达到极限时,则需要人类及时接管。这种人机协作的模式,既发挥了机器的精准与快速,又保留了人类对复杂场景的判断能力。
理想车主的经历揭示了一个重要真相:最理想的安全状态不是系统完全自主处理危机,而是人机协同形成双重保障。系统用技术弥补人类感官的不足,人类用判断力弥补机器的局限。这种互补关系,或许正是智能驾驶技术最有温度的呈现方式——它不是冰冷的机器替代,而是可靠的伙伴守护。


