在人机共存的复杂环境中,机器人的社交导航能力成为了衡量其智能化水平的关键指标。社交导航,即在遵循社会规范的前提下,机器人自主执行导航任务,这一领域正面临着前所未有的挑战。
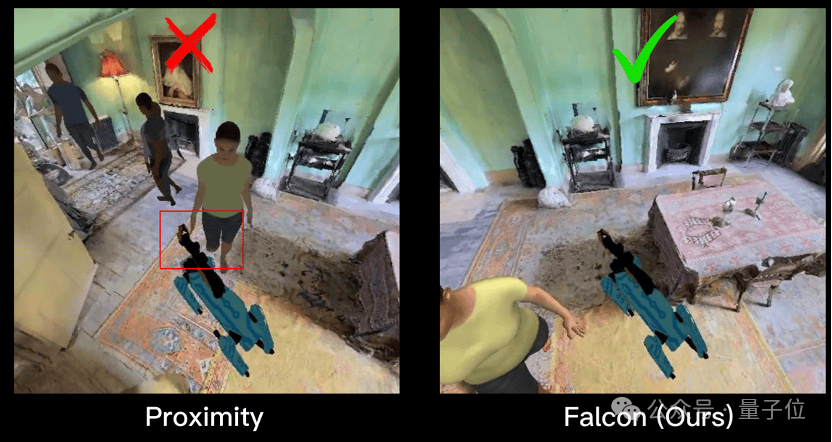
想象一下,一个机器人需要在密集的人群中穿梭,目标点恰好位于两名行人未来轨迹的交汇点。此时,机器人不仅要灵活规避潜在的碰撞风险,还需与行人保持适当的社交距离,这无疑对机器人的导航算法提出了极高的要求。
传统的预建地图方法在面对人群密集的动态环境时显得力不从心,而现有的强化学习(RL)方法又存在短视决策和过度依赖全局信息的问题。为了克服这些难题,香港科技大学(广州)和香港科技大学的研究团队联合提出了一种名为Falcon的新算法。
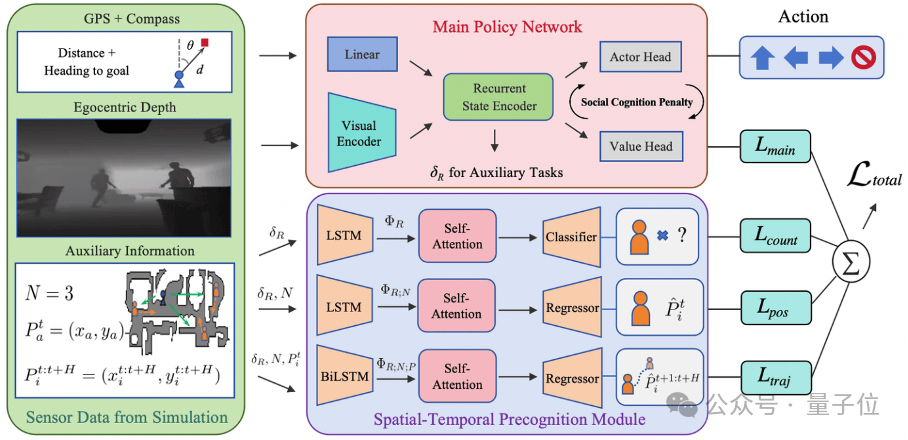
Falcon算法的核心在于将轨迹预测算法融入社交导航任务中,从而实现长期动态避障并提升导航性能。该算法框架由两个主要模块组成:主策略网络和时空预知模块。
主策略网络是Falcon的“大脑”,负责指导机器人的行动。它引入了社会认知惩罚机制,通过设计专门的惩罚函数来避免机器人干扰人类的未来轨迹,从而有效规避碰撞风险并保持社交距离。这些惩罚项包括障碍物碰撞惩罚、人类接近惩罚和轨迹阻碍惩罚。
而时空预知模块则结合轨迹预测与多种社交感知辅助任务,显著增强了机器人对未来环境动态变化的预测能力。它能够预测场景中的人数、实时跟踪行人位置以及预测未来几秒内行人的路径,从而帮助机器人提前规划避障策略。
然而,社交导航领域的另一个重要挑战在于现有基准的真实性不足。现有基准通常过于简化场景,忽略了场景的复杂性,同时行人动作僵硬、运动模式失真,难以反映实际场景中的交互情况。
为了弥补这些缺陷,研究团队构建了两个新的数据集——Social-HM3D和Social-MP3D。这两个数据集基于高精度3D扫描技术,涵盖了公寓、办公楼、商场等多种室内场景,并采用了多目标导向的轨迹生成算法和ORCA动态避障模型来模拟人类的自然行为。这些新基准不仅平衡了人机交互的社交密度,还避免了过度拥挤的情况。
实验结果表明,Falcon算法在目标达成和社会合规方面表现出色。在Social-HM3D数据集中,Falcon达到了55.15%的成功率和成功路径效率(SPL),即使在未训练过的Social-MP3D数据集上也能取得55.05%的成功率。同时,在保持社交距离和避免碰撞方面,Falcon也表现出良好的性能。
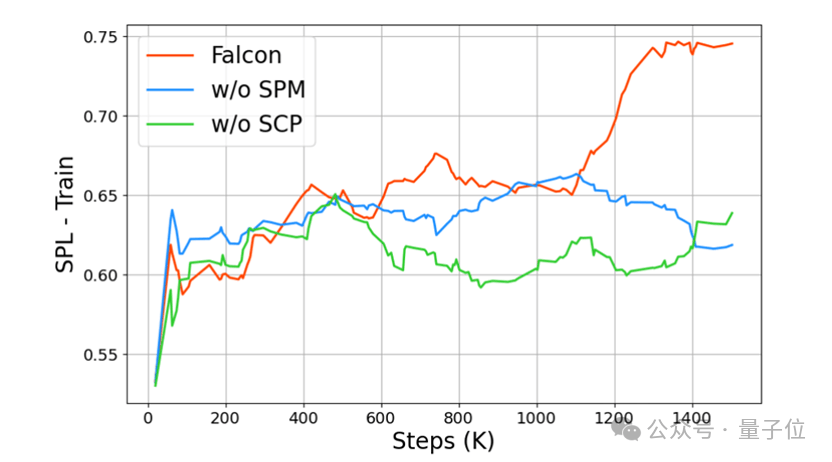
研究团队还发现了几个关键结论。首先,未来感知算法优于以往的实时感知算法,因为它能够主动预测行人轨迹并提前调整路径,从而显著提升安全性和效率。其次,辅助任务有助于提高导航性能,其中轨迹预测最为重要。最后,社会认知惩罚机制(SCP)和时空预知模块(SPM)相辅相成,能够改善性能并加快训练收敛速度。
随着Falcon算法的提出和新基准的构建,社交导航领域的研究将迈上新的台阶。这些成果不仅为机器人提供了更加智能、高效的导航策略,还为未来的人机交互和智能机器人发展奠定了坚实的基础。