杭州宇树科技有限公司近日在技术创新领域迈出重要一步,其最新专利“基于多传感器数据融合的动态时空同步建图方法和系统”正式在中国专利公布公告网上亮相。该专利的公布,标志着宇树科技在解决机器人感知技术难题上取得了突破性进展。
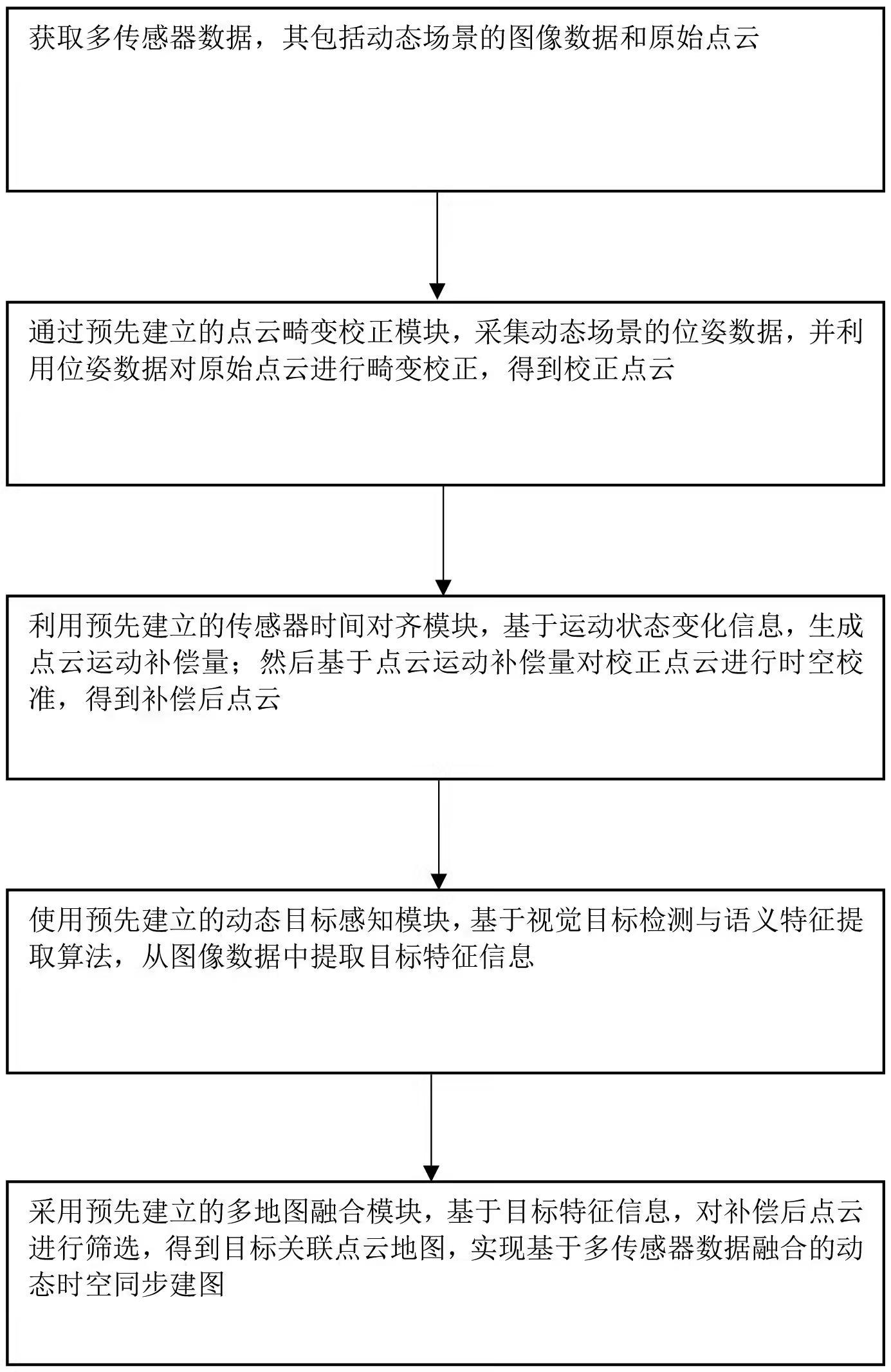
据专利详细阐述,这一创新技术主要聚焦于多传感器融合过程中的时空同步性问题。传统技术在这一领域往往面临挑战,导致机器人在识别与跟踪动态目标时精度受限。宇树科技的此项专利,通过精细的数据融合算法,有效克服了这一障碍,使得机器人能够在复杂多变的动态环境中,对目标进行准确无误的追踪与定位。
尤为该专利还针对性地解决了动态场景下传感器数据时空错位的问题。通过一系列精密的计算与调整,系统能够将定位误差控制在厘米级范围内,从而极大提升了时空同步的精确度。这一改进,无疑为机器人在自动驾驶、智能监控等领域的广泛应用奠定了坚实的基础。

该专利的发布,不仅展示了宇树科技在技术创新方面的强大实力,也预示着未来机器人技术将更加智能化、精准化。随着技术的不断迭代升级,我们有理由相信,机器人将在更多领域展现出其独特的价值与潜力。
宇树科技的这一创新成果,无疑为行业树立了新的标杆,也为推动机器人技术的进一步发展注入了新的活力。我们期待,在不久的将来,能够看到更多基于这一技术的智能产品走进我们的日常生活,为人类社会带来更多的便利与惊喜。